This project was a fun and challenging project for me where I had the opportunity to put into practice what I learned about Autonomous Agents in games and animation, focusing on math and physics (mainly Vectors) and how to apply their principles to model and simulate complex behaviors through programming.
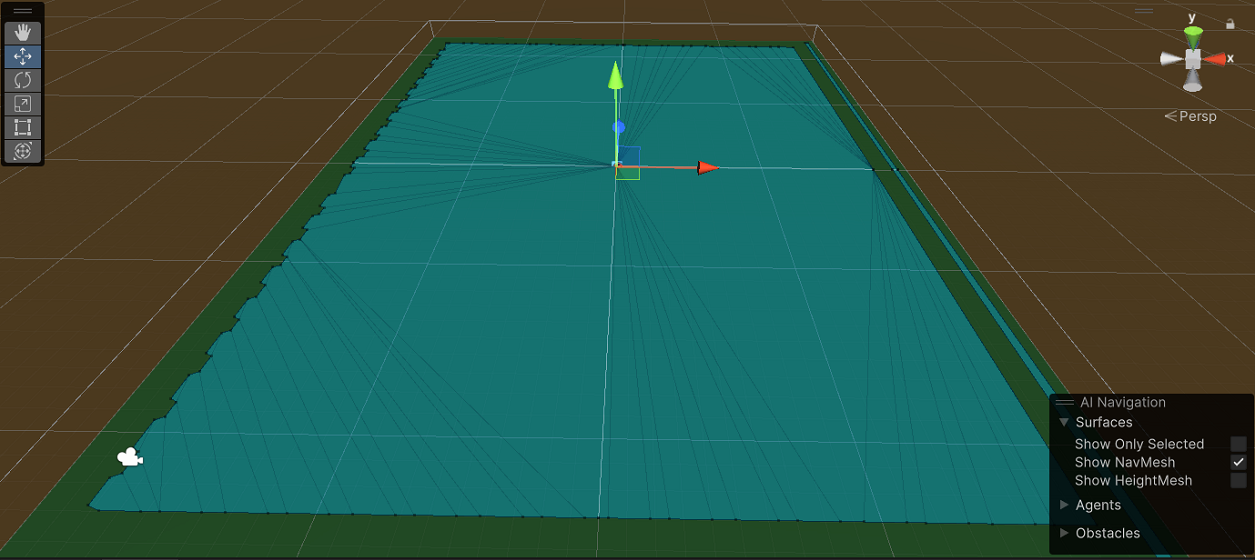
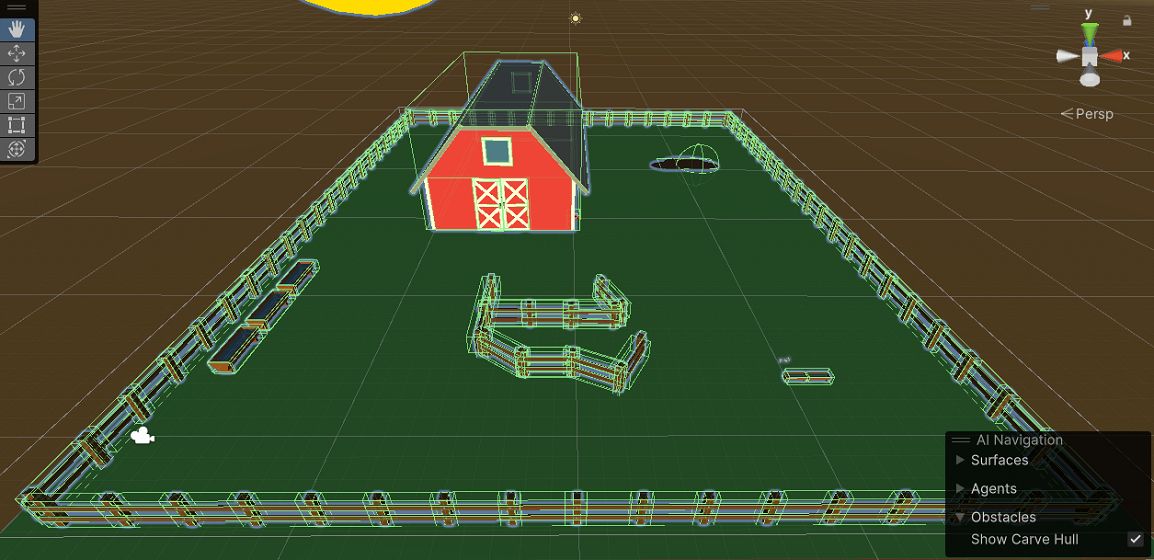
I had decided to make a simple farm simulation with low poly assets, where the player character is a farmer and the AI agents are animals. Through this simple world I could focus on giving the animals agents the ability to navigate around their world in a life-like and improvisational manner.
Check Project Repository